Étape 5 : Pilotage de puissance et pont en H
Choix de l'architecture de puissance
Après avoir validé la partie logicielle et la communication Bluetooth, l'étape fonctionnelle suivante est le pilotage du bloc mécanique. Pour permettre à la banquette de s'ajuster en hauteur, nous devons contrôler la rotation d'un moteur à courant continu dans les deux sens, tout en ayant la capacité d'en moduler la vitesse d'exécution pour des mouvements fluides.
Le composant choisi pour cette interface est le pont en H BD62130 (U7 sur notre schéma). Ce circuit intégré est dimensionné pour isoler notre logique de commande 5V (ATMEGA328P) de la partie puissance, protégeant ainsi le microcontrôleur des forts courants ou retours de tension du moteur.
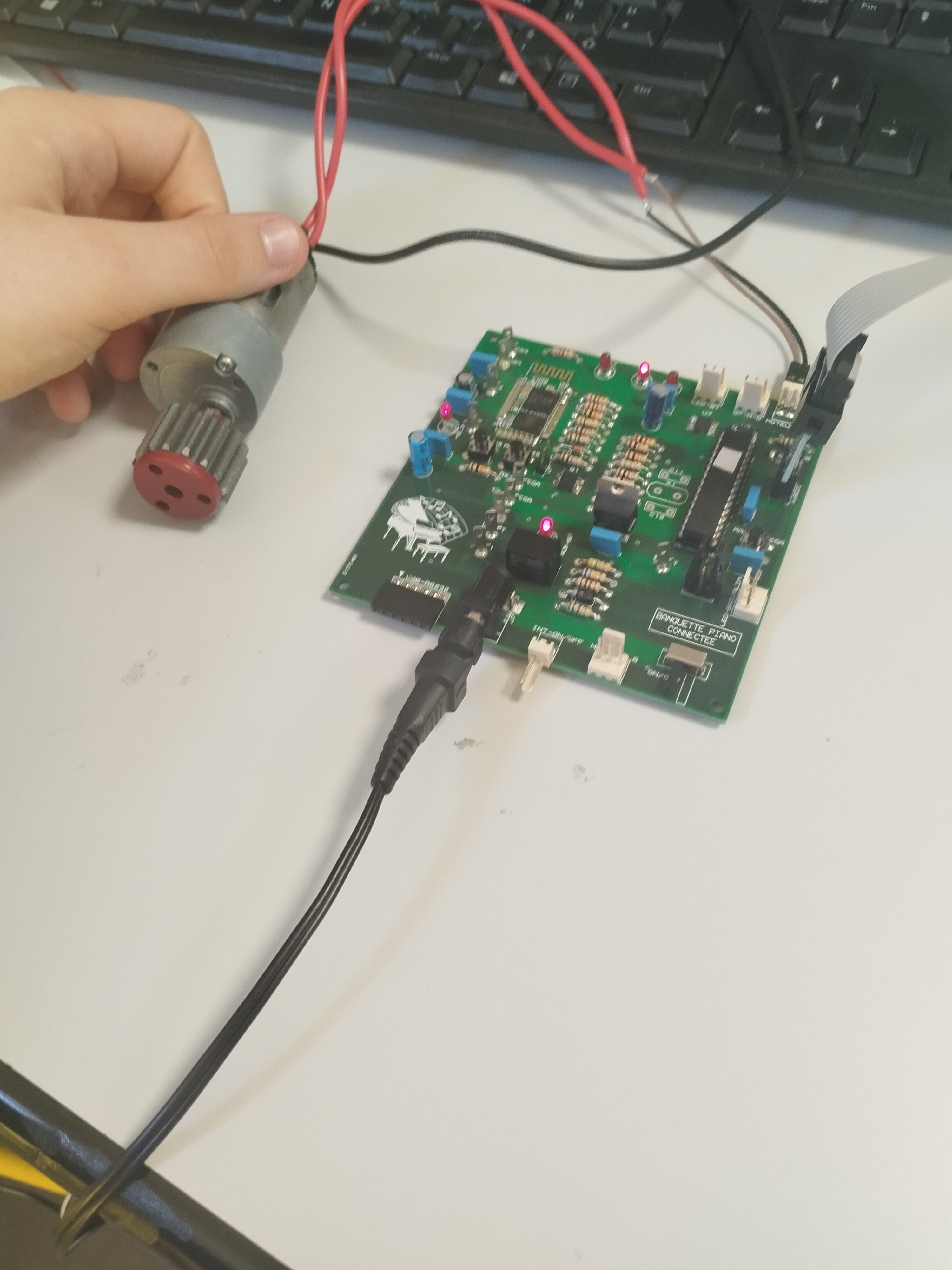
Schéma de câblage et circuits de filtrage
L'intégration du BD62130 nécessite un montage rigoureux pour limiter les interférences électromagnétiques (EMI) et les instabilités de tension liées à l'inductance du moteur. Voici le détail du routage :
- Broches 1 et 4 (GND) : Reliées au plan de masse commun du circuit.
- Broche 3 (VCC) : Branchée directement sur l'alimentation de puissance (
VBAT). Les appels de courant importants au démarrage du moteur imposent un découplage de l'alimentation : un condensateur électrolytique de 100µF (C11) permettant d'absorber les pics d'intensité, couplé en parallèle à un condensateur céramique de 100nF (C3) dédié au filtrage des parasites de haute fréquence. - Broche 7 (TEST) : Mise à la masse (GND), conformément aux spécifications du composant, afin de garantir le fonctionnement en mode standard.
- Broches 5 (IN1) et 6 (IN2) : Entrées logiques du pont en H. Elles sont connectées aux sorties D5 et D6 de l'ATMEGA328P. Ces broches du microcontrôleur présentent l'avantage de supporter les signaux PWM (Pulse Width Modulation). Cela nous permet de définir le sens de rotation (en basculant les états logiques) et de faire varier précisément la vitesse en ajustant le rapport cyclique du signal.
- Broches 2 (OUT1) et 8 (OUT2) : Sorties de puissance, connectées directement aux bornes du moteur.
Validation sur banc d'essai
La commutation des signaux a été testée avec un voltmètre avant raccordement. La configuration logicielle attribue une impulsion PWM sur le canal IN1 (tandis que IN2 est à LOW) pour une rotation horaire, et inversement pour la rotation antihoraire.
Ces tests valident de manière probante ce circuit. La consigne reçue via Bluetooth est correctement traduite par le microcontrôleur en un signal logique, puis convertie par le pont en H en un courant de puissance qui entraîne le moteur, le tout de manière électrique stable grâce à l'étage de condensateurs inséré sur l'alimentation.